
 Journal Publications
Journal Publications
| 2025 | 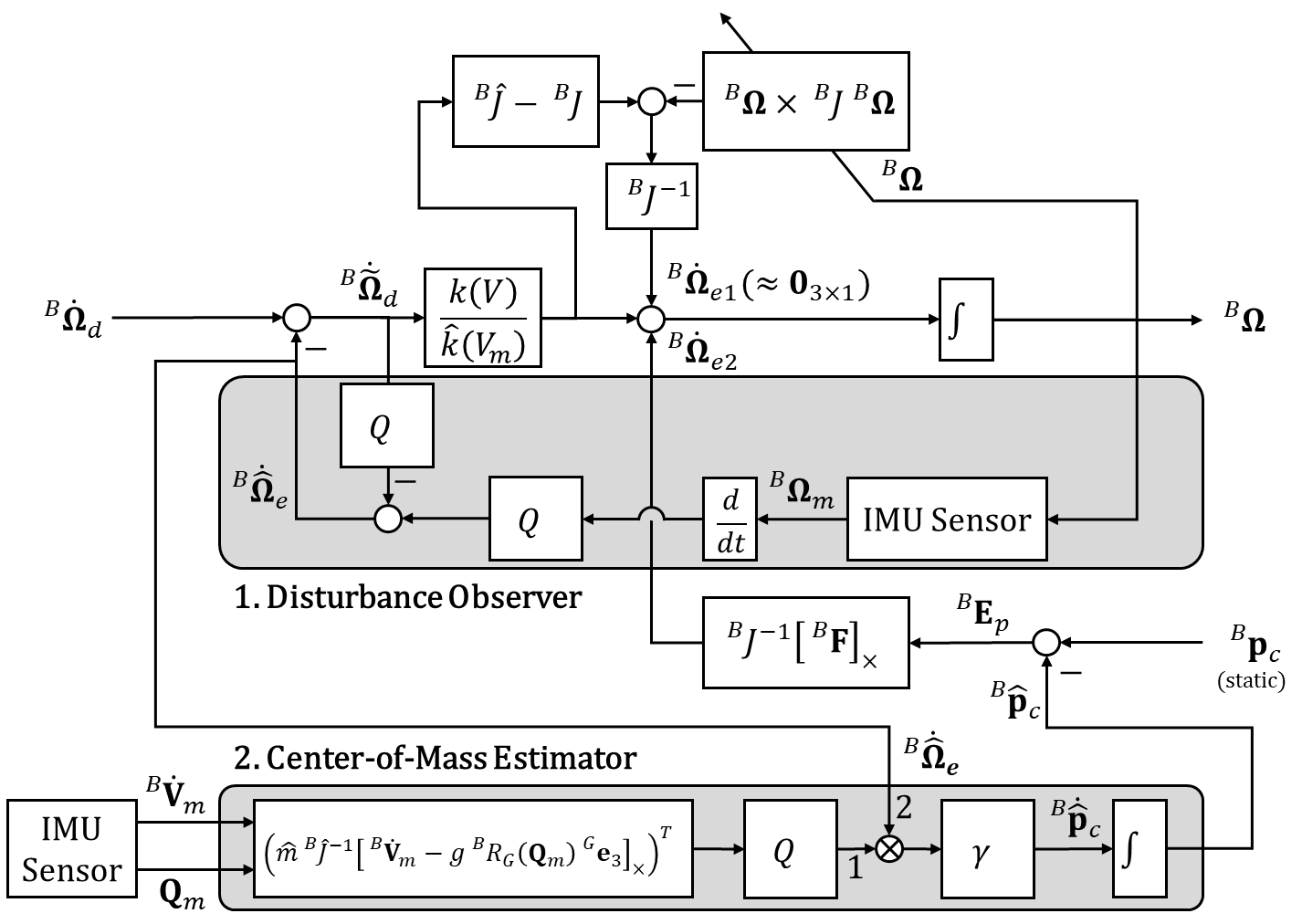 |
Robust-Adaptive Control for Fully-Actuated Multirotor UAVs Under Center-of-Mass Variations [VIDEO] Seuk Seo, Hyungeun Park, Geonwoo Park, and Seung Jae Lee IEEE Robotics and Automation Letters (RA-L) (currently under review) |
|---|---|---|
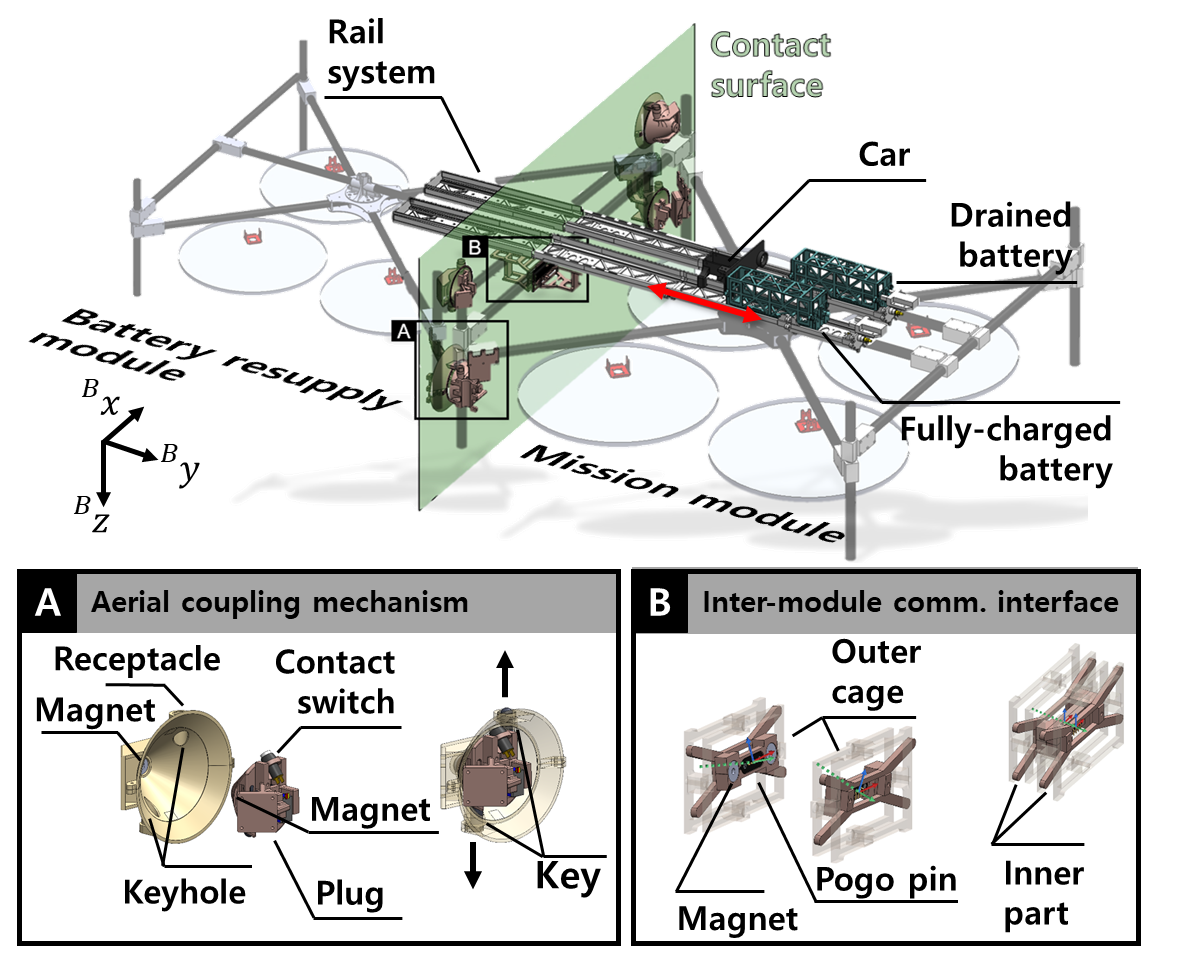
| Aerial Dockable Multirotor UAVs: Design, Control and Flight Time Extension through In-flight Battery Replacement [VIDEO] [Code] Yeongin Song*, Hyunmin Kim*, Jeonghyun Byun, Keun Park, Murim Kim, and Seung Jae LeeIEEE Access | |
| 2024 | | Yae-Joon Yang, Seo-Hyeon Han, Sunuk Ahn, Jungwoo Kim, Seung Jae Lee, Keun Park Additive Manufacturing |
| Design and Analysis of Three-Dimensional Chiral Metamaterials for Enhanced Torsional Compliance Minjung Ji, Yonghoi Cho, Seung Jae Lee and Keun ParkSmart Materials and Structures | |
| The Palletrone Cart: Human-Robot Interaction-Based Aerial Cargo Transportation [VIDEO] Geonwoo Park, Hyungeun Park, Wooyong Park, Dongjae Lee, Murim Kim, and Seung Jae Lee(May 31th, 2024 - Accepted) IEEE Robotics and Automation Letters (RA-L) | |
2023 |
| Design, Modeling and Control of a Top-loading Fully-actuated Cargo Transportation Multirotor [VIDEO] Wooyong Park, Xiangyu Wu, Dongjae Lee, Seung Jae Lee(July 10th, 2023 - Accepted) Submitted to IEEE Robotics and Automation Letters (RA-L) |
2022 |
| Design and Control of Drones |
2020 |
| Aerial Manipulator Pushing a Movable Structure using a DOB-based Robust Controller [VIDEO] Dongjae Lee, Hoseong Seo, Inkyu Jang, Seung Jae Lee, H. Jin KimIEEE Robotics and Automation Letters (RA-L, SCI Q1) *2021 IEEE ICRA Best Paper Award - Winner |
| Fail-Safe Flight of a Fully-Actuated Quadrotor in a Single Motor Failure [VIDEO] Seung Jae Lee, Inkyu Jang, H Jin KimIEEE Robotics and Automation Letters (RA-L, SCI Q1) | |
| Fully-Actuated Autonomous Flight of Thruster-Tilting Multirotor [VIDEO] Seung Jae Lee, Dongjae Lee, Junha Kim, Dabin Kim, Inkyu Jang, H. Jin KimIEEE/ASME Transactions on Mechatronics (T-Mech, SCI Q1) | |
| 2019 |  | Robust Translational Force Control of Multi-Rotor UAV for Precise Acceleration Tracking [VIDEO] Seung Jae Lee, Seung Hyun Kim, H. Jin Kim IEEE Transactions on Automation Science and Engineering (T-ASE, SCI Q1) |
Conference Proceedings
| 2025 | 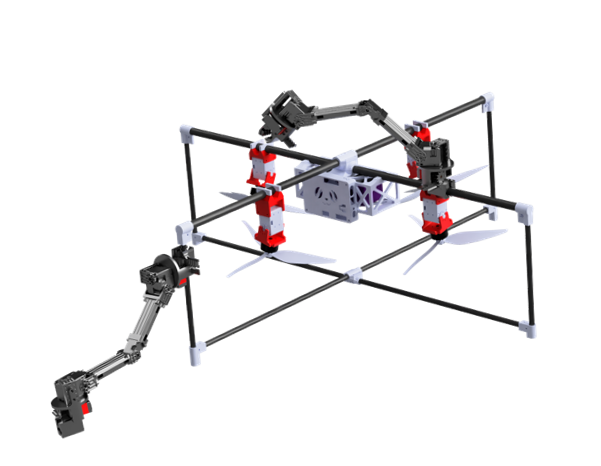 |
Robust Flight Control of Reconfigurable Inchworm Aerial Manipulator with Online Center of Mass Estimation Hanryung Shin, Yeong In Song, Yujin Choi, and Seung Jae Lee 2025 14th IFAC Symposium on Robotics (IFAC MSROB25) |
|---|---|---|
2024 |
| Seuk Seo, Yujin Choi, Hanryung Shin, and Seung Jae Lee 2024 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2024) |
| Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller [VIDEO] Dongjae Lee, Seunwoo Hwang, Jeonghyun Byun, Seung Jae Lee, and H. Jin Kim 2024 IEEE International Conference on Robotics and Automation (ICRA 2024) | |
2023 | | Minimally actuated tiltrotor for perching and normal force exertion Dongjae Lee, Sunwoo Hwang, Changhyeon Kim, Seung Jae Lee, H. Jin Kim 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
2022 |
| Design and Control of FAC-MAV: A Fully-Actuated Cubic Multirotor Aerial Vehicle Wooyong Park, Seung Jae Lee2022 The 13th Asian Control Conference (ASCC) |
2021 |
| Autonomous flight through cluttered outdoor environments using a memoryless planner [VIDEO] Junseok Lee, Xiangyu Wu, Seung Jae Lee, Mark W. Mueller2021 International Conference on Unmanned Aircraft Systems (ICUAS) |
| 2019 |  |
Trajectory Tracking for Cooperative Transportation with T3-multirotor Dabin Kim, Seung Jae Lee, H. Jin Kim 2019 19th International Conference on Control, Automation and Systems (ICCAS)(*Acceptance Rate: N/A) |
 |
Cargo Transportation Strategy using T3-Multirotor UAV Seung Jae Lee, Dongjae Lee, H. Jin Kim 2019 IEEE International Conference on Robotics and Automation (ICRA)(*Acceptance Rate: 44%) | |
2018 |
|
Seung Jae Lee, Kelley E. Hashemi, Michael C. Drew, Nhan T. Nguyen, H. Jin Kim 2018 Annual American Control Conference (ACC)(*Acceptance Rate: 64%) |
|
Design, Modeling and Control of T3-Multirotor: A Tilting Thruster Type Multirotor [VIDEO] Seung Jae Lee, Jaehyun Yoo, H. Jin Kim 2018 IEEE International Conference on Robotics and Automation (ICRA) (*Acceptance Rate: 40.6%) | |
2017 |
|
Trajectory generation for networked UAVs using online learning for delay compensation Jaehyun Yoo, Seung Jae Lee, H. Jin Kim, Karl H. Johansson 2017 IEEE Conference on Control Technology and Applications (CCTA)(*Acceptance Rate: 63%)
|
| Autonomous swing-angle estimation for stable slung-load flight of multi-rotor UAVs [VIDEO] | |
2016 |
| Robust acceleration control of a hexarotor UAV with a disturbance observer |
| Exposure correction and image blending for planar panorama stitching | |
2015 |
| [Korean] 고정밀 RTK 보정 GPS 를 이용한 실외 헥사로터 무인항공기 제어 |
 Misc. Publications
Misc. Publications
* 2025
- Aerial Manipulation with Locomotive Inchworm Robot, 최유진, 신한륭, 이승제, KROC 2025
- Real-Time Normal Vector Estimation Algorithm for Aerial Manipulators in Unstructured Surface Tasks, 서세욱, 이승제, KROC 2025
- Cooperative Aerial Transportation of Elastic Continuum Structure with NN-based Flexible Body Analysis, 박현근, 박건우, 이승제, KROC 2025
* 2023
- Development of Aerial Docking-Based Battery Replacement System for Modular Multi-rotor Unmanned Aerial Vehicle, 송영인, 김현민, 이승제, ICROS 2023
- Compliance Control-Based HRI Flight Control for Cargo Transportation Multirotor, 박우용, 박건우, 박현근, 신한륭, 이승제, ICROS 2023
- Manipulator System Based on Compliance Control for Object Manipulation, 최솔, 서세욱, 정상혁, 이승제, ICROS 2023 [Best Undergraduate Paper Award-Winner]
* 2022
- Hardware and Control Method for Counter-rotating Coaxial Multirotor, 신한륭, 이승제, 한국정밀공학회 2022 추계학술대회 [Best Paper Award-Winner]
- Research on Flight Time Extension based on Aerial Battery Exchange of Modular Aerial Robot, 김현민, 송영인, 이승제, 한국정밀공학회 2022 추계학술대회
* 2021
- Development of Novel Fully-Actuated Multi-Rotor UAV with Thrust Vectoring Actuator for Bulky Cargo Transportation, 이승제, 신재욱, 2021년도 제 1회 국방로봇학회 [Best Paper Award-Winner]
- Mecanum wheel-based autonomous wheelchair driving system, 신재호, 강현우, 신재욱, 이승제, 한국생산제조학회 2021년도 추계학술대회
- 6-DOF Multirotor UAV Transportation System for Cargo Transportation, 이승제, 한국생산제조학회 2021년도 추계학술대회 Patents* International
[Under review] [USA] Aerial Transportation System - 18/862,653
[PCT] Aerial Transportation System - PCT/KR2024/016920
[USA] Flight Vehicle - US 11,560,223 B2
[PCT] Flight Vehicle - PCT/KR2018/015715
*Domestic
[Under review] [KOR] 항공 화물 운송용 드론 타입의 카트 시스템 - 10-2024-0080520
[Under review] [KOR] 도킹 가이드가 구비되는 도킹 장치 - 10-2024-0107292
[KOR] 드론의 공중 도킹 구조 - 2853506
[KOR] 드론의 공중 배터리 교환 구조 - 2841886
[Under review] [KOR] 화물 운반용 비행체 및 그 동작 방법 - 10-2023-0019081
[KOR] 화물 운반용 비행체 및 그 동작 방법 - 2829648
[KOR] 휠 플랫폼 자율주행을 위한 메카놈휠 기반 견인 로봇 및 주행제어 방법 - 2731560
[KOR] 비행체 및 비행체 제어방법 - 2323581
[KOR] 비행모듈 및 이를 구비한 비행체 - 2427766
[KOR] 비행체 - 2129075
[KOR] 비행체 - 1978888